Controlli della macchina
Con un’attenzione particolare alla durata e all’affidabilità, le nostre unità di controllo sono utilizzate da molti anni nell’ingegneria meccanica e impiantistica. Qui troverete alcuni esempi di computer di controllo estremamente potenti, tutti progettati per un uso impegnativo nella costruzione di veicoli o impianti. I dispositivi hanno un’elevata potenza di calcolo, possono essere collegati in rete via CAN e funzionano preferibilmente insieme ai nostri dispositivi operativi. Il design meccanico: robusto alloggiamento in alluminio
Nota bene: i prodotti qui illustrati fanno parte della nostra attuale famiglia di prodotti e sono solitamente sviluppati per scenari applicativi specifici. Se necessario, saremo lieti di apportare modifiche al progetto e di sviluppare il software necessario per soddisfare le nuove esigenze. Se vi mancano funzioni o caratteristiche per la vostra applicazione, non esitate a contattarci. Saremo lieti di soddisfare le vostre esigenze con adattamenti di dispositivi esistenti o nuovi sviluppi!

Balercontrol IV
BC4SG
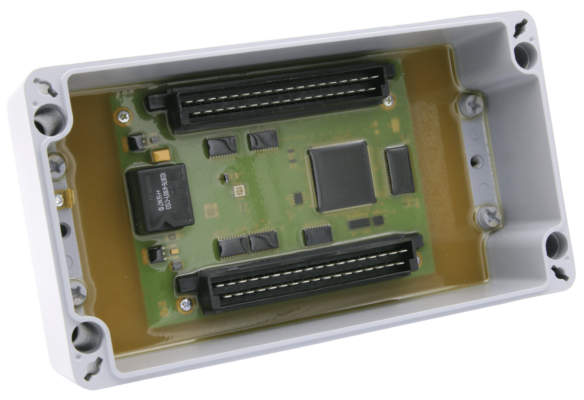
L’unità di controllo Balercontrol IV è una potente unità di controllo universale per macchine agricole. Grazie ai numerosi ingressi dei sensori, alle uscite degli attuatori e all’unità centrale del computer, può essere facilmente adattato a diversi altri compiti. L’incapsulamento completo dell’elettronica consente la durata anche in condizioni meccaniche difficili. La comunicazione con l’esterno può avvenire tramite RS232, CAN o ISObus, se lo si desidera. In combinazione con le nostre unità di controllo, mostra tutti i suoi punti di forza.
- Comunicazione tramite CAN, ISObus e RS232
- 20 canali di ingresso, di cui 9 analogici con carico commutabile
- 8 uscite di commutazione, 4A (opt. 20A), PWM
- Processore da 30 MHz
- 3 MByte di memoria di programma
- 1 MByte di RAM
- 64MByte (opt. 128MByte/ 256MByte) di memoria dati non volatile
- Sensore di temperatura
- Elettronica con incapsulamento completo

iRCP
Controllore idraulico elettronico
Con l’iRCP apriamo il nostro Balercontrol per voi! È dotato di un sistema a due processori e può essere programmato con l’ambiente di sviluppo software iRCP sotto ScicosLab per lo sviluppo di software basato su modelli con strumenti open-source. Un processore ARM M4 fornisce una potenza di calcolo sufficiente. 16 ingressi di sensori, 16 uscite di attuatori fino a 10A e la comunicazione via RS232, CAN e USB offrono numerose possibilità di applicazione.
- Sistema a doppio processore con processore ARM M4 a 32 bit
- Comunicazione via RS232, CAN e USB
- 8 uscite di potenza a commutazione high-side, con capacità PWM, di cui 4 con misurazione della corrente
- 8 uscite di potenza a commutazione low-side, con capacità PWM, accoppiabili a ponti H
- 16 ingressi analogici/digitali con risoluzione a 10 bit e carico commutabile per ind. Sensori Namur
- Alimentazione del sensore 4 volte regolabile via software
- Compatibile con USB/Multi-CAN
- Elettronica con incapsulamento completo


Commander Control 2000
CC2000
Il Commander Control 2000 combina un’unità di comando e di controllo ed è stato sviluppato appositamente per il controllo delle mietitrebbie. Con numerosi ingressi e uscite, oltre alla comunicazione CAN e RS232, il CC2000 è l’interfaccia centrale tra uomo e macchina. Per non lasciare l’operatore al buio durante la notte, il display e la tastiera a membrana sono ovviamente retroilluminati.
- Sistema con processore C167 con memoria di programma da 512kByte e comunicazione CAN/RS232
- Display monocromatico da 160×160 pixel, retroilluminato
- 44 Uscite di commutazione high-side
- 36 ingressi digitali
- 4 ingressi analogici
- Alimentazione del sensore a 5 V
Balance
Livella elettronica (2 assi)
Il Balance è stato sviluppato per il livellamento automatico delle mietitrebbie durante la guida in pendenza. Il dispositivo misura l’inclinazione del veicolo con il nostro inclinometro a semiconduttore, calcola le misure correttive necessarie tramite un potente computer integrato e avvia direttamente le misure correttive tramite l’impianto idraulico collegato, per stabilizzare sempre il veicolo in posizione orizzontale anche su terreni irregolari.
- Misura affidabile dell’inclinazione tramite inclinometro a semiconduttore
- Potente sistema µP a 16 bit (C167)
- 22 canali di carico in varie configurazioni per il controllo di lampade, valvole, relè, ecc.
- 14 ingressi A/D
- Comunicazione via CAN e RS232
- Computer incapsulato in un robusto alloggiamento in metallo pressofuso (IP67)


SG Light
Unità di controllo elettronica a basso costo
Il nostro SG Light dimostra che il tailor-made non deve essere necessariamente costoso: sviluppato appositamente per il controllo di macchine nel settore agricolo, la sua gamma di funzioni è ridotta all’essenziale e offre quindi un’opzione a basso costo con sei ingressi e uscite ciascuno.
- Design compatto e robusto grazie all’incapsulamento nell’alloggiamento standard
- Processore 8051 con capacità CAN
- 6 ingressi/uscite ciascuno
- Comunicazione via CAN e RS232
CAN Micro Module
Minimalismo. Con CAN.
Il nostro CAN Micro Module è un computer satellite per l’espansione economica delle reti CAN. L’espansione del sistema in un ambiente CAN esistente può essere realizzata in modo particolarmente economico e semplice con questo dispositivo. L’unità può essere utilizzata vantaggiosamente anche per semplici applicazioni stand-alone. Il modulo CAN è attualmente disponibile in due versioni: Come semplice computer di controllo con 8 ingressi A/D e 4 uscite per attuatori o ottimizzato per l’uso come ponte H per il controllo dei motori.
- Microcontrollore a 8 bit (8051) con comunicazione CAN/RS232
- 4 canali di carico high-side
- 7(8) Ingressi analogici/digitali.
- Alimentazione del sensore opzionale
- Elettronica incapsulata in una robusta custodia di fresatura in alluminio (80*66mm²)
- Variante disponibile per il collegamento come ponte H, ad esempio per il controllo di motori.


CCP3
Dispositivo di controllo del motore lineare / commutazione del carico
Il CCP3 è progettato per controllare 4 motori (50 ampere ciascuno) con funzionamento avanti/indietro. Il consumo di corrente di ciascun motore viene misurato individualmente. Quando viene raggiunta una corrente limite preimpostata, il motore viene automaticamente arrestato dal controllo a microprocessore integrato. Ciò consente di inserire le frizioni a cinghia con una tensione riproducibile o di rilevare i fine corsa dei motori.
- Sistema di processori XE162 con comunicazione CAN/RS232
- Controllo di 4 motori (MOSFET da 50 amp) con funzionamento avanti/indietro.
- Monitoraggio della temperatura di ciascun ponte H
- Misura di corrente per motore nell’intervallo +/- 50A
- 4 ingressi digitali e 8…12 ingressi analogici con risoluzione a 12 bit
- Alimentazione del sensore regolabile via software
- Elettronica con incapsulamento completo
- Controllo tramite segnali di commutazione o via CAN
CC
Unità di controllo/operativa per gli accoppiamenti principali (unità lunga)
È così compatta da poter essere installata nel bracciolo del sedile del conducente (applicazione attuale in una mietitrebbia) (30*10*140 mm³), eppure questa unità ospita un controllo a microprocessore completo con 10 uscite di commutazione, 8 ingressi di commutazione, controllo della tastiera a membrana (6 tasti) e 2 LED di visualizzazione integrati.
Per garantire la massima resistenza alle influenze esterne, l’elettronica è incapsulata in un robusto alloggiamento in alluminio fresato.
HLC
Regolatore di velocità dell’aspo (unità corta)
In un robusto alloggiamento in alluminio di soli 10*30*104 mm³ è integrato un regolatore di velocità completo controllato da microprocessore, simile a un “cambio elettronico”. L’unità registra le velocità, calcola gli algoritmi di regolazione e controlla l’impianto idraulico di regolazione.
Il conducente può preimpostare il rapporto di velocità variabile desiderato tramite comandi esterni.
