Commandes de machines
Nos appareils de commande, qui mettent l’accent sur la longévité et la fiabilité, sont utilisés depuis de nombreuses années dans la construction de machines et d’installations. Vous trouverez ici quelques exemples de calculateurs de commande extrêmement performants, tous conçus pour une utilisation exigeante dans la construction de véhicules ou d’installations. Les appareils disposent d’une grande puissance de calcul, peuvent en principe être mis en réseau via CAN et fonctionnent de préférence avec nos appareils de commande. La version mécanique : boîtier robuste en aluminium
Attention : les produits présentés ici font partie de notre famille de produits actuelle et sont généralement développés pour des scénarios d’utilisation spécifiques. En cas de besoin, nous pouvons volontiers effectuer des modifications de la conception et développer le logiciel nécessaire pour répondre à des exigences modifiées. S’il vous manque des fonctions ou des caractéristiques pour votre application, n’hésitez pas à nous contacter. Nous essayons volontiers de répondre à vos exigences en adaptant les appareils existants ou en développant de nouveaux produits!

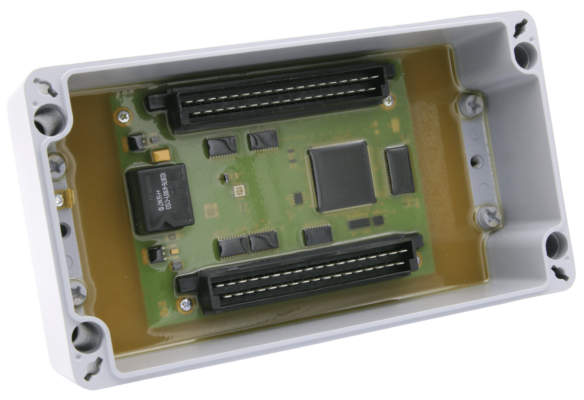
Balercontrol IV
BC4SG
L’appareil de commande Balercontrol IV est un appareil de commande universel performant pour le secteur du machinisme agricole. Mais avec de nombreuses entrées de capteurs, des sorties d’actionneurs et une unité centrale de calcul, il peut aussi être facilement adapté à diverses autres tâches. Un scellement complet de l’électronique permet une longue durée de vie, même dans des conditions mécaniques exigeantes. La communication avec l’extérieur peut se faire sur demande via RS232, CAN ou ISObus. C’est en association avec nos appareils de commande qu’il déploie tous ses atouts.
- Communication via CAN, ISObus et RS232
- 20 canaux d’entrée, dont 9 analogiques avec charge commutable
- 8 sorties de commutation, 4A (opt. 20A), PWM
- Processeur de 30 MHz
- 3 Mo de mémoire de programme
- 1 Mo de RAM
- 64Mo (opt. 128Mo/ 256Mo) mémoire de données non volatile
- Capteur de température
- Électronique enrobée

iRCP
Régulateur hydraulique électronique
Avec l’iRCP, nous vous ouvrons notre Balercontrol ! Elle est équipée d’un système à deux processeurs et peut être programmée avec l’environnement de développement logiciel iRCP sous ScicosLab pour le développement de logiciels basés sur des modèles avec des outils open-source. Un processeur ARM M4 assure une puissance de calcul suffisante. 16 entrées de capteurs, 16 sorties d’actionneurs avec jusqu’à 10A et une communication via RS232, CAN et USB offrent de nombreuses possibilités d’application.
- Système à deux processeurs avec processeur ARM M4 32 bits
- Communication via RS232, CAN et USB
- 8 sorties de puissance à commutation high-side, compatibles PWM, dont 4 avec mesure de courant
- 8 sorties de puissance à commutation low-side, compatibles PWM, peuvent être couplées en ponts en H
- 16 entrées analogiques/numériques avec une résolution de 10 bits et une charge désactivable pour la mesure de la température ind. Capteurs Namur
- quadruple alimentation des capteurs réglable par logiciel
- Compatible USB/Multi-CAN
- Électronique enrobée


Commander Control 2000
CC2000
Le Commander Control 2000 est un boîtier de commande et de contrôle spécialement conçu pour les moissonneuses-batteuses. Avec ses nombreuses entrées et sorties, ainsi que la communication CAN et RS232, le CC2000 est l’interface centrale entre l’homme et la machine. Pour que l’utilisateur ne reste pas dans l’obscurité la nuit, l’écran et le clavier à membrane sont bien entendu rétroéclairés.
- Système de processeur C167 avec 512ko de mémoire de programme et communication CAN/RS232
- écran monochrome de 160×160 pixels, rétroéclairé
- 44 Sorties de commutation côté haut
- 36 entrées numériques
- 4 entrées analogiques
- 5V Alimentation du capteur
Balance
Niveau à bulle électronique (2 axes)
L’équilibre a été conçu pour le nivellement automatique des moissonneuses-batteuses en pente. L’appareil mesure l’inclinaison du véhicule à l’aide de notre inclinomètre à semi-conducteurs, calcule les mesures correctives nécessaires à l’aide d’un ordinateur puissant intégré et déclenche directement des mesures correctives via le système hydraulique raccordé afin de toujours stabiliser le véhicule en position horizontale, même sur un terrain accidenté.
- mesure fiable de l’inclinaison grâce à un clinomètre à semi-conducteurs
- Puissant système µP 16 bits (C167)
- 22 canaux de charge dans les configurations les plus diverses pour la commande de lampes, de vannes, de relais, etc.
- 14 entrées A/D
- Communication via CAN et RS232
- ordinateur moulé dans un boîtier robuste entièrement métallique (IP67)


SG Light
Appareil de commande électronique low-cost
Notre SG Light montre que le sur-mesure n’est pas forcément cher. Spécialement conçu pour la commande de machines dans le domaine du machinisme agricole, ses fonctionnalités sont réduites au strict minimum et offrent ainsi une option low-cost avec six entrées et six sorties chacune.
- Forme compacte et robuste grâce au surmoulage dans le boîtier standard
- Processeur 8051 compatible CAN
- 6 entrées/sorties chacune
- Communication via CAN et RS232
CAN Micro Module
Le minimalisme. Avec CAN.
Notre module CAN Micro est un ordinateur satellite permettant d’étendre les réseaux CAN à moindre coût. Cet appareil permet de réaliser une extension de système particulièrement économique et simple dans un environnement CAN existant. De même, l’appareil peut être utilisé avantageusement pour des applications simples et autonomes. Le module CAN est actuellement disponible en deux versions : Comme simple calculateur de commande avec 8 entrées A/D et 4 sorties d’actionneurs ou optimisé pour une utilisation comme pont en H pour la commande de moteurs.
- Microcontrôleur 8 bits (8051) avec communication CAN/RS232
- 4 canaux de charge côté haut
- 7(8) Entrées analogiques/numériques.
- Alimentation des capteurs en option
- électronique scellée dans un boîtier robuste en aluminium fraisé (80*66mm²)
- Variante disponible pour le câblage en tant que pont en H, par ex. pour la commande de moteurs


CCP3
Commande de moteur linéaire / commutateur de charge
Le CCP3 a été conçu pour commander 4 moteurs (50 ampères chacun) avec marche avant/arrière. La consommation de courant de chaque moteur est mesurée individuellement. Lorsqu’un courant limite prédéfini est atteint, le moteur est automatiquement stoppé par la commande à microprocesseur intégrée. Cela permet d’embrayer les embrayages à courroie avec une tension de courroie reproductible ou de détecter les butées de fin de course des moteurs.
- Système de processeur XE162 avec communication CAN/RS232
- Commande de 4 moteurs (MOSFET 50 ampères) avec marche avant/arrière.
- Surveillance de la température de chaque pont en H
- Mesure du courant par moteur dans la plage +/- 50A
- 4 entrées numériques et 8…12 entrées analogiques avec une résolution de 12 bits
- Alimentation des capteurs réglable par logiciel
- Électronique enrobée
- Commande par signaux de commutation ou par CAN
CC
Appareil de commande/manipulation pour attelages principaux (appareil long)
Il est si compact qu’il peut être installé dans l’accoudoir d’un siège de conducteur (application actuelle dans une moissonneuse-batteuse) (30*10*140 mm³), et pourtant cet appareil abrite une commande à microprocesseur à part entière avec 10 sorties de commutation, 8 entrées de commutation, commande d’un clavier à membrane (6 touches) et 2 LED d’affichage intégrées.
Pour une résistance maximale aux influences extérieures, l’électronique est moulée dans un boîtier robuste en aluminium fraisé.
HLC
Régulateur de vitesse du dévidoir (appareil court)
Un régulateur de vitesse complet commandé par microprocesseur, de type « boîte de vitesses électronique », est ici intégré dans un boîtier de fraisage robuste en aluminium de seulement 10*30*104 mm³. L’appareil se charge alors de la saisie des vitesses de rotation, du calcul des algorithmes de régulation ainsi que de la commande du système hydraulique de réglage.
Le conducteur peut définir le rapport de vitesse variable souhaité via des commandes externes.
